|
I am a PhD student at MIT CSAIL studying continual learning and robotic AI. I am advised by Pulkit Agrawal and am thankful to be supported by the NSF GRFP. I recieved my B.S. in Electrical Engineering and Computer Science (EECS) from UC Berkeley with Honors. I was an undergraduate researcher at Berkeley Artificial Intelligence Research under Sergey Levine. I also previously worked with Bruno Olshausen from the Redwood Center for Theoretical Neuroscience. Lastly, I was a member of Machine Learning at Berkeley where I led research projects, made free course content, and mentored incoming students.
Summer 2024: On hiatus |

|
|
I am most interested in the theory of intelligence and how to create general learning systems that encompass this definition. The age-old question of AGI has so strongly captivated me that I am certain I would like to dedicate my life’s career to exploring it. I think that physical embodiment will play a significant role in the creation of AGI, thus I find that robotics and robot learning is an excellent testbed for AI research. |
|
TBD Authors First Author Paper We present a compositional skill discovery feedback loop for fast online exploration and planning. |
|
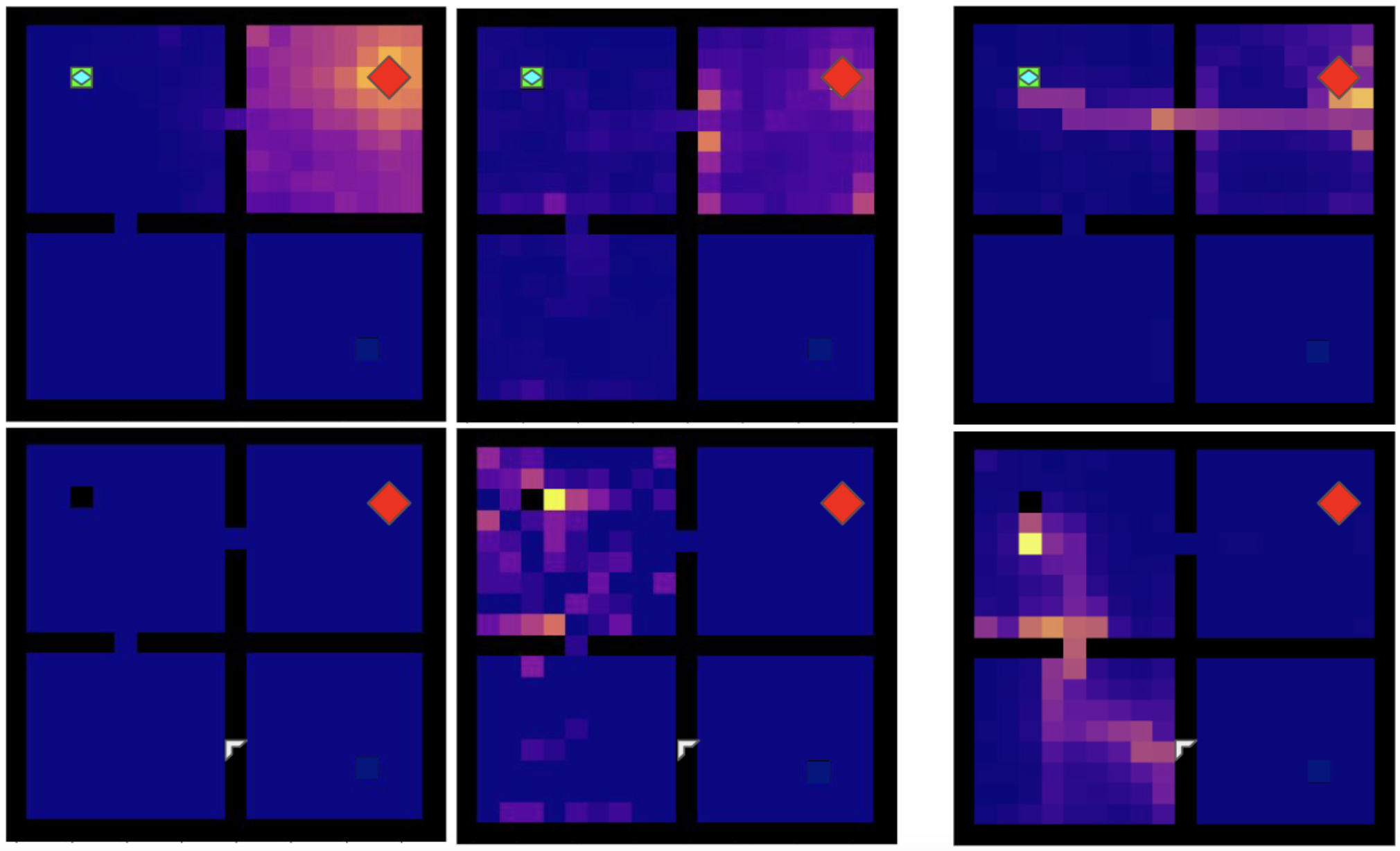
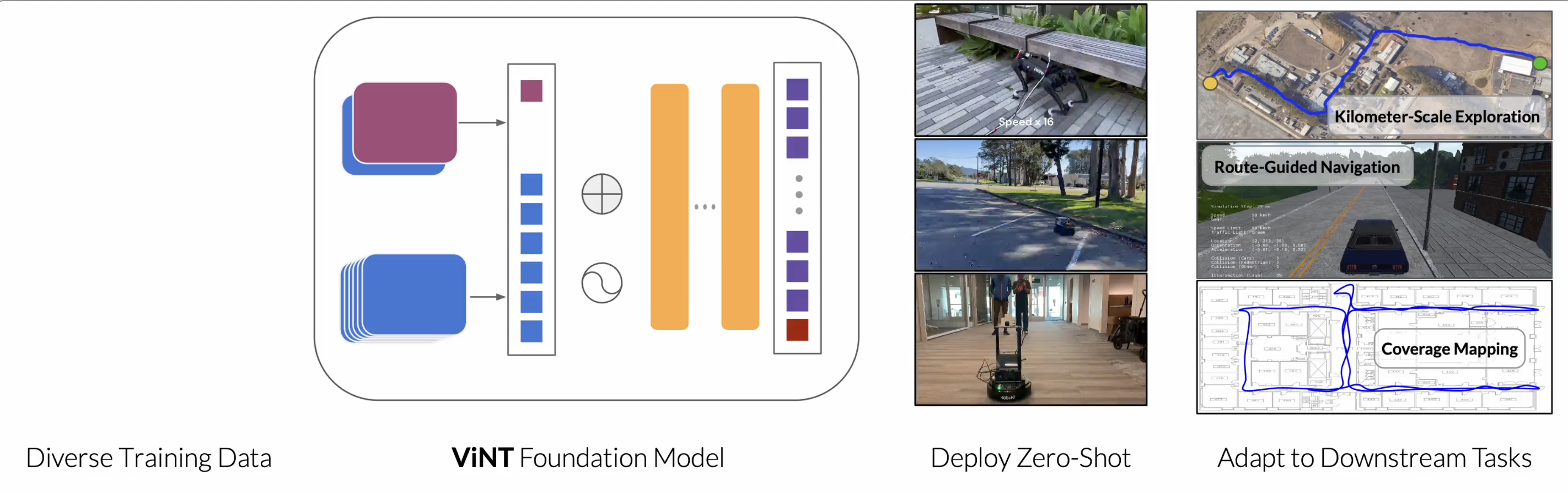
Dhruv Shah*, Ajay Sridhar*, Nitish Dashora*, Kyle Stachowicz, Kevin Black, Noriaki Hirose, Sergey Levine CoRL 2023 (Oral), BayLearn 2023 (Oral), Robot Learning @ NeurIPS 2023. Equal First Author. project page / arXiv We present a multi-robot visual navigation foundation model for effective fine-tuning and novel task adaptation. |

|
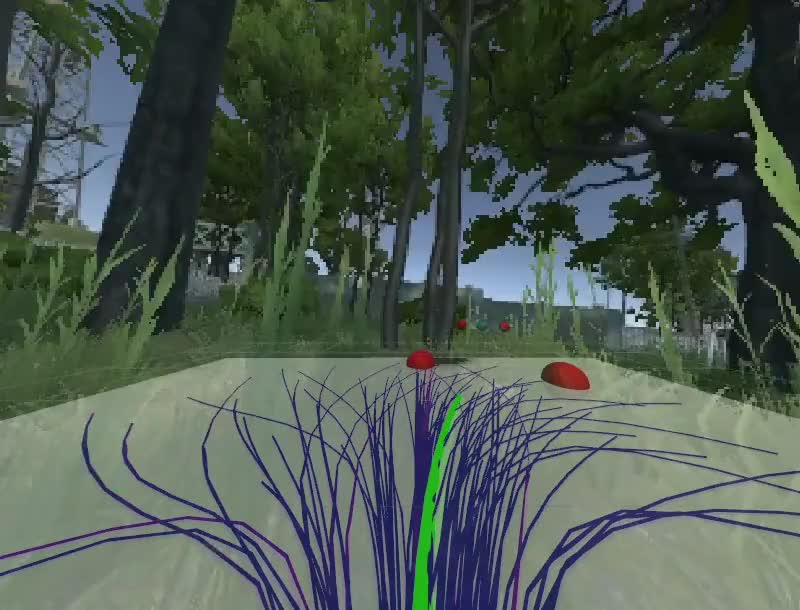
Nitish Dashora*, Sunggoo Jung*, Valentin Ibars, Osher Lerner, Calvin Jung, Dhruv Shah, Nicholas Rhinehart, Ali Agha-Mohammadi IPPC @ IROS 2023, LRSA @ IROS 2023. First Author. video DAgger-like imitative learning with model predictive path integral control works as an end-to-end navigation system. |
|
Nitish Dashora*, Daniel Shin*, Dhruv Shah, Henry Leopold, David Fan, Ali Agha-Mohammadi, Nicholas Rhinehart, Sergey Levine ICRA 2022. First Author. project page / arXiv / video Combining geometric costmaps and learned models improves long-range navigation in offroad environments. |
|
|
|
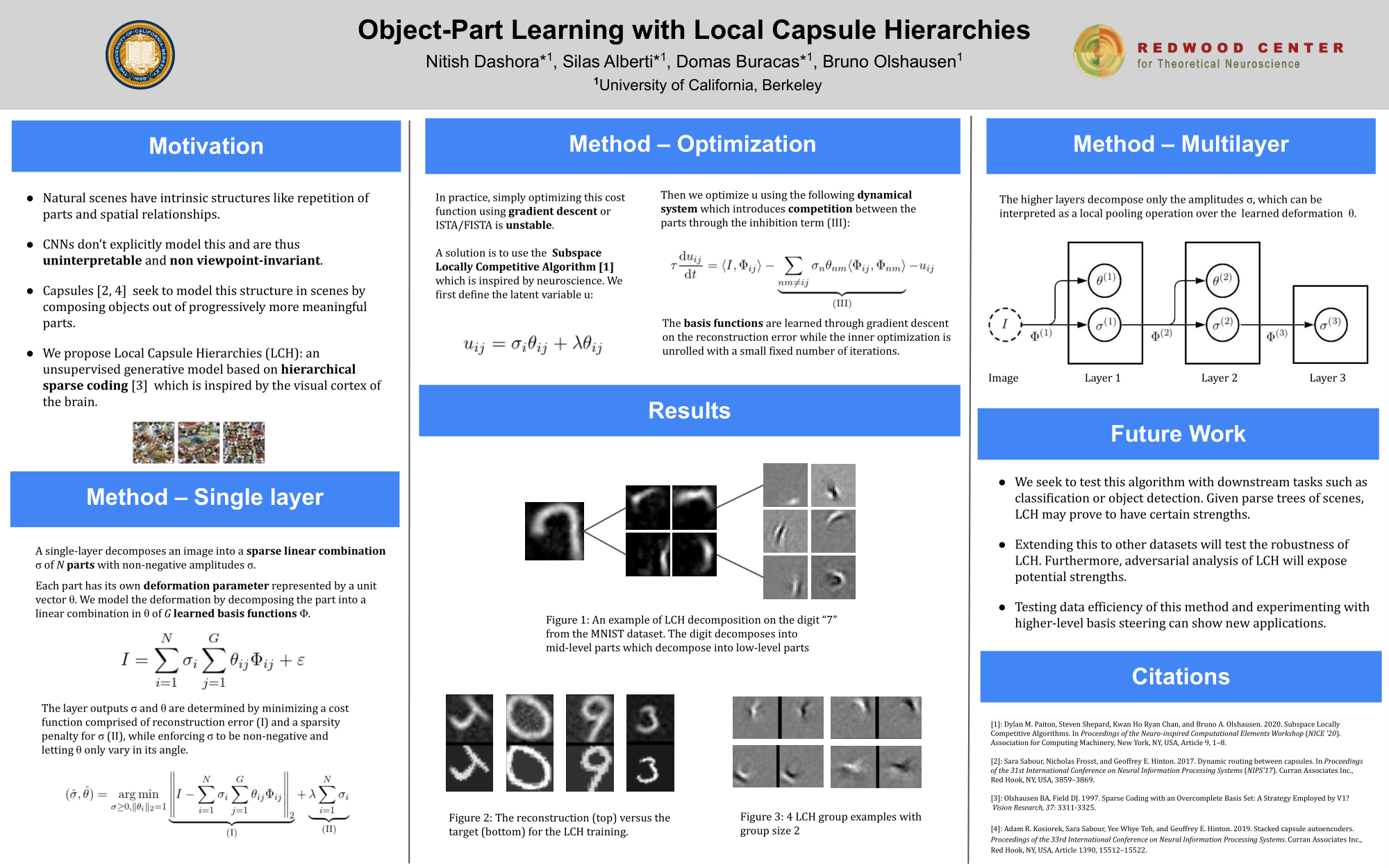
Object-Part Learning with Local Capsule Hierarchies
Nitish Dashora*, Silas Alberti*, Domas Buracas*, Bruno Olshausen, Berkeley EECS and Research Symposium 2021. First Author. Hierarchical Sparse Codes with learned steering can handle MNIST deformations. |
|
|

